Channel¶
The simplified concept of the channel is the interface for the synchronized data transfer between sender (can be imagined as a client) and reply (can be imagined as a server) thread. Channel implementation currently supports data transfer from multiple sender threads to one reply thread. For more information please read the channel section in the Whitepaper.
Configuration¶
1. Open the CustomBox¶
Then we have to open from the left panel Channels tab to see all configured channel elements in the system as it is shown in the picture below.
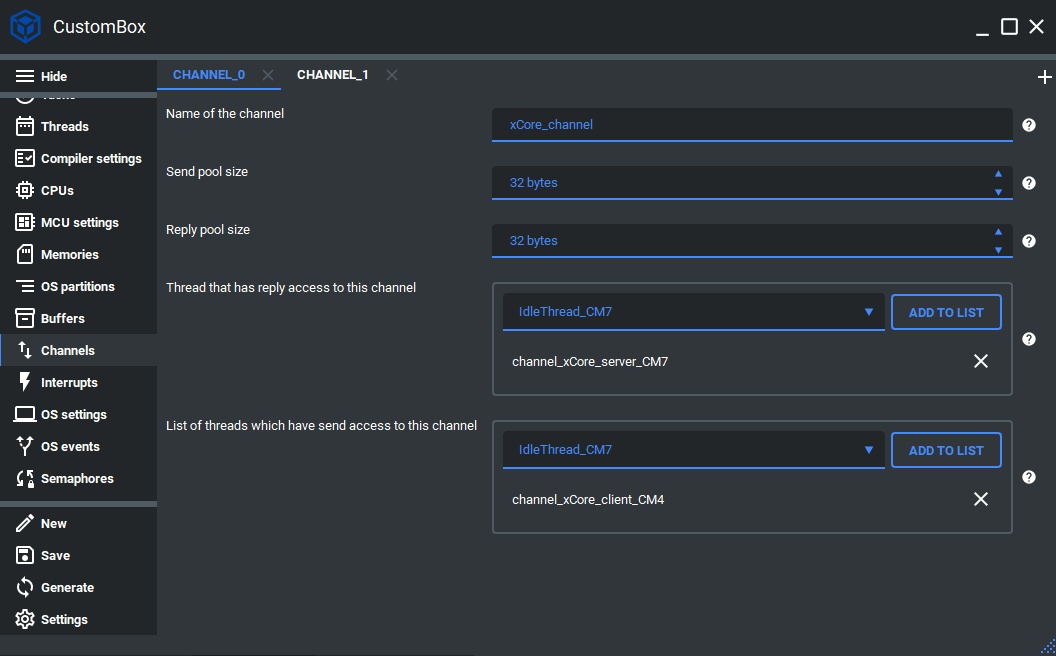
2. Configure or add new channel¶
Name of the channel is set to xCore_channel, this is the name of the channel which will be used to generate channel identifier used in the channel send and reply operations.
Send pool size is set to 32 Bytes, this parameter defines the size of send pool array mapped in the operating system memory that is used during send operation.
Reply pool size is set to 32 Bytes, this parameter defines the size of reply pool array mapped in the operating system memory that is used during reply operation.
List of threads which have reply access to this channel contains channel_xCore_server_CM7 which means that this thread is reply (server) thread for this channel.
List of threads which have send access to this channel contains channel_xCore_client_CM4 which means that this thread is send (client) thread for this channel, if we want to add for instance IdleThread_CM7 we just click on add to list button.
3. Generate¶
After we click on the Generate button in the CustomBox left panel on the bottom, the channel configuration code is generated and we can use it in the application layer. The code examples of send and reply operations are shown in the next section.
Code examples¶
Channel send thread¶
For channel send operation the function channel_send() was implemented.
-
CosmOS_ChannelStateType channel_send(BitWidthType channelId, AddressType *userSendDataPool, BitWidthType userSendPoolSize, AddressType *userReplyDataPool, BitWidthType userReplyPoolSize)
#include <channel.h>
#include <errorHandler.h>
CosmOS_ChannelStateType channelState;
unsigned char replyPool[32] = {0};
unsigned char sendPool[] = "request";
for(;;)
{
channelState = channel_send( xCore_channel_id,
(AddressType *)sendPool,
sizeof(sendPool),
(AddressType *)replyPool,
sizeof(replyPool));
if( errorHandler_isError( channelState ) )
{
//error was returned, check its value
}
if( errorHandler_isError( sleepState ) )
{
//error was returned, check its value
}
}
Return values¶
Channel reply thread¶
For channel initialization operation the function channel_initialize() was implemented.
-
CosmOS_ChannelStateType channel_initialize(BitWidthType channelId)
For channel receive operation the function channel_receive() was implemented.
-
CosmOS_ChannelStateType channel_receive(BitWidthType channelId, AddressType *userReceiveDataPool, BitWidthType userReceiveDataPoolSize)
For channel reply operation the function channel_reply() was implemented.
-
CosmOS_ChannelStateType channel_reply(BitWidthType channelId, AddressType *userReplyDataPool, BitWidthType userReplyDataPoolSize)
#include <channel.h>
#include <errorHandler.h>
CosmOS_ChannelStateType channelState;
unsigned char receivePool[32] = {0};
unsigned char replyPool[] = "reply";
channelState = channel_initialize( xCore_channel_id );
if( errorHandler_isError( channelState ) )
{
//error was returned, check its value
}
for(;;)
{
channelState = channel_receive( xCore_channel_id,
(AddressType *)receivePool,
sizeof(receivePool) );
if( errorHandler_isError( channelState ) )
{
//error was returned, check its value
}
channelState = channel_reply( xCore_channel_id,
(AddressType *)replyPool,
sizeof(replyPool) );
if( errorHandler_isError( channelState ) )
{
//error was returned, check its value
}
}